A wearable robotic device, developed by Beihang and MIT, is enabling children with muscular dystrophy to achieve independent standing.
Robotic Assist Revolutionizes Pediatric Mobility
Researchers have engineered a sophisticated exoskeleton that provides crucial support for pediatric patients struggling with progressive muscle weakness characteristic of muscular dystrophy. The technology represents a significant advancement in assistive robotics, offering a tangible solution to mobility challenges faced by vulnerable populations.
The device functions as an external skeletal aid, actively assisting the user's lower body movements to facilitate upright posture and ambulation training. This intervention moves beyond passive bracing, engaging in dynamic support that mimics natural gait patterns while compensating for muscle degradation.
According to details provided by Pandaily, this collaborative effort between Beihang and MIT focused intensely on designing a system that is both robust enough to handle significant load bearing and lightweight enough for extended daily use by children. The integration of advanced sensing technology allows the robot to adapt its support level in real-time according to the child's immediate physical needs.
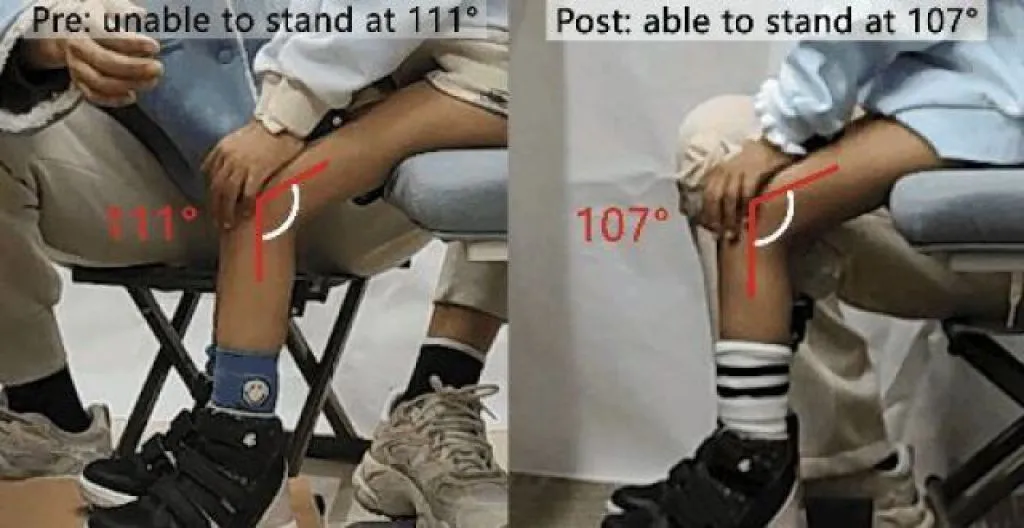
Clinical trials indicate that consistent use of the wearable robot measurably improves users’ ability to maintain an upright stance and facilitates crucial gait training exercises otherwise inaccessible due to debilitating muscle weakness. The strategic implications of this technology extend beyond mere mobility; it directly impacts developmental milestones, self-efficacy, and quality of life for affected children.
The development addresses a critical gap in current medical assistive technologies, which often struggle with the dynamic variability inherent in neuromuscular disorders. By providing powered assistance tailored to individual physiological decline, the Beihang-MIT system offers a pathway toward greater functional independence rather than just static support.
Technical Specifications and Future Trajectory
The engineering achievement lies in the precise control algorithms governing the robotic actuators. These systems translate complex biomechanical data into smooth, supportive movements, ensuring that the assistance provided is both effective and minimally disruptive to the child’s natural movement intentions. This level of adaptive control distinguishes it from earlier, more rigid exoskeleton prototypes.
The research underscores a growing trend in bio-inspired engineering, where computational power meets advanced material science to solve complex human physical challenges. The partnership between Beihang's manufacturing expertise and MIT's deep academic rigor provided the necessary dual focus on practical implementation and theoretical optimization.
Future iterations of this wearable robot are anticipated to incorporate enhanced sensor arrays for even finer motor control and potentially integrate into broader rehabilitation ecosystems. Researchers plan to explore how the robotic assistance can be modulated across different stages of muscular dystrophy progression, tailoring the support profile as muscle strength inevitably changes over time.
This breakthrough signals a maturing field where robotics is transitioning from laboratory curiosities to essential clinical tools. The successful deployment of this technology offers hope for sustained physical activity and increased autonomy for children managing severe neuromuscular conditions globally. Further studies are expected to validate the long-term efficacy and scalability of this innovative assistive platform.


